
 ≤ζΤΖ:13
≤ζΤΖ:13

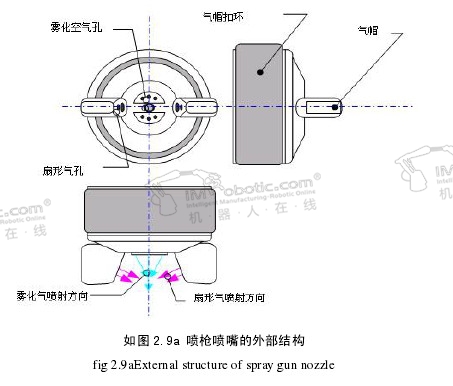
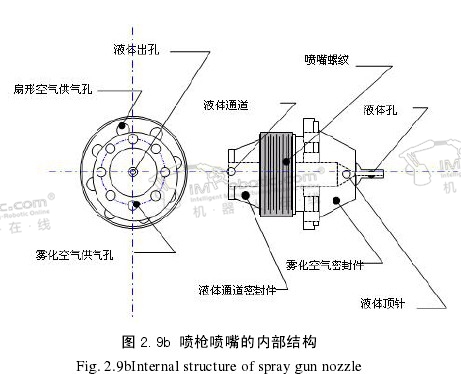
Τχ≈γΒΡΙΛΉς‘≠άμ «άϊ”Ο¥σΝςΝΩΒΡΈμΜ·Ω’ΤχΑ―”ΆΤαΈμΜ·≥…–Γ“ΚΒΈΘ§άϊ”Ο―ΙΥθΩ’ΤχΩΊ÷Τ”ΆΤα–Γ“ΚΒΈΚΆ≈γΆΩ…»ΟφΒΡ¥σ–Γ¥οΒΫ***ΩΊ÷Τ≈γΆΩΒΡΡΩΒΡΓΘ≈γΉλΒΡΫαΙΙ(»γΆΦ2. 9aΚΆbΘ©ΓΘ
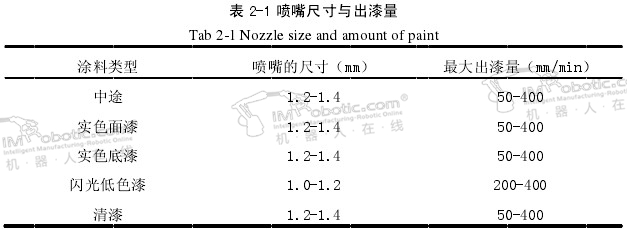
ΈΣΝΥΜώΒΟΝΦΚΟΒΡ≈γΆΩ–ßΙϊΘ§≈γ***≈γΉλΒΡ≥Ώ¥γΚΆΚœ ΒΡΕΞ’κΒѯÔϻΓΨω”ΎΆΩΝœΒΡάύ–ΆΘ§≤ΜΡή≥§≥ωΙφΕ®ΒΡ***¥σΒΡ≥ωΤαΝΩ(»γ±μ2-1)ΓΘ
≈γΆΩΜζΤς»Υ–ΐΤ”ΒΡΙΛΉς‘≠άμ
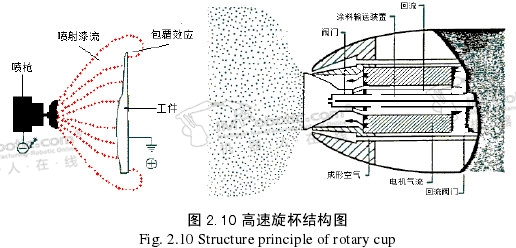
–ΐ±≠ «Ά®ΙΐΗΏ―ΙΩ’Τχ«ΐΕ·ΗΏΥΌΤχ¬μ¥οΘ§¥χΕ·±≠ΩΎ¥χ”–≥ίΈΤΒΡΗΏΥΌ–ΐ±≠ά¥ΈμΜ·ΆΩΝœΓΘ‘Ύ¥ΥΆ§ ±ΩΊ÷Τ–ΐ±≠÷ήΈßΒΡ≥…–ΈΩ’Τχά¥ΩΊ÷ΤΤαΈμ…»ΟφΒΡ¥σ–ΓΘ§“‘¥οΒΫ***ΩΊ÷Τ≈γΆΩΒΡΡΩΒΡΓΘ–ΐ±≠ΒΡΫαΙΙΆΦ(»γΆΦ2. 10Υυ Ψ)ΓΘ
≈γΆΩΜζΤς»Υ‘ΥΕ·ΜζΙΙΒΡ‘≠άμ
ΡΩ«Α Β―ι “ Ι”ΟΒΡ≈γΆΩΜζΤς»Υ”–2Ηω‘ΥΕ·ΜζΙΙΘ§X÷αΗΚ‘π±≥ΑεΒΡΉσ”““ΤΕ·Θ§Z÷αΗΚ‘π≈γΆΖΒΡ…œœ¬“ΤΕ·ΓΘΆ®ΙΐPLCΩΊ÷ΤX÷αΥ≈ΖΰΒγΜζ¥χΕ·Ά§≤Ϋ¥χ Ι±≥ΑεΉσ”““ΤΕ·Θ§Υ≈ΖΰΒγΜζ¥χΕ·Z÷αΆ§≤Ϋ¥χ***Ά–Θ§ Ι≈γΆΖ…œœ¬“ΤΕ·ΓΘ
≈γΆΩΜζΤς»ΥΗΡΫχΖΫΑΗ»ΖΕ®
ΆΩΝœ―–ΖΔ≈γΆΩΜζΤς»ΥΒΡ”Π”ΟΈΣΆΩΝœ―–ΖΔΉω≥ωΝΥΚή¥σΑο÷ζΘ§ΫβΨωΝΥ”…”Ύ»ΥΙΛ≈γΆΩΜρ’Ώ≈γΆΩΦΤ≈γΆΩΜζ≤ΜΈ»Ε®“ρΥΊ≤ζ…ζΒΡ÷ ΝΩΈ ΧβΘ§ΈμΜ·ΤςΒΡ Ι”Ο Ι≈γΆΩ–߬ ”–ΥυΧαΗΏΘ§ΤαΡΛΗϋΦ”Ψυ‘»Θ§ΗΡ…ΤΝΥΙΛΉς»Υ‘±ΒΡΙΛΉςΜΖΨ≥Θ§¥”Εχ±Θ÷ΛΝΥΙΛΉς»Υ‘±ΒΡΫΓΩΒΑ≤»ΪΘ§ΫΎ‘ΦΝΥ≥…±ΨΘ§ΧαΗΏΝΥ÷ ΝΩΓΘ≈γΆΩΜζΤς»ΥΨΏ”–ΓΔ≈γΆΩΈ»Ε®ΓΔ≈γΆΩ–߬ ΗΏΓΔΫΎ‘Φ≥…±ΨΒ»ΧΊΒψΓΘ
- œ¬“ΜΤΣΘΚFANUCΈόΉηΑ≠¬ΖœΏΙΠΡή ≈γΆΩœΒΆ≥Ι ’œΫβΨωΖΫΖ®
- …œ“ΜΤΣΘΚABBΜζ≈γΆΩΜζΤς»ΥΒΡ”≈ΒψΚΆ”Π”Ο